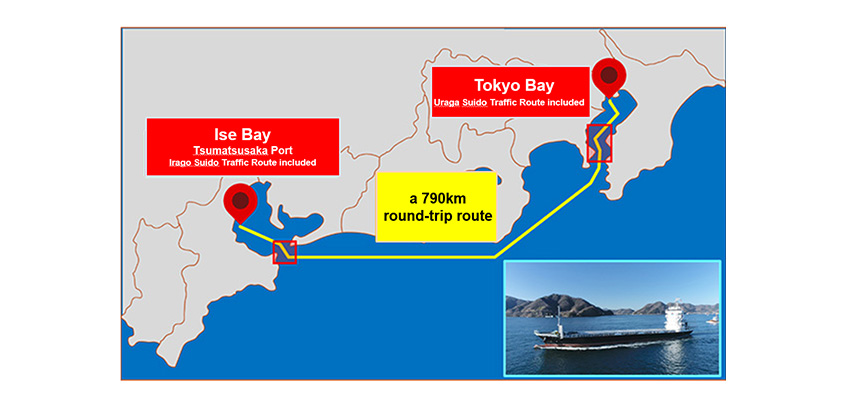
Test of fully autonomous ship navigation was successfully carried out between Tokyo Bay and Ise Bay (a 790km round-trip route)

The DFFAS (Designing the Future of Full Autonomous Ship) Consortium*¹ conducted a demonstration test of fully autonomous ship navigation between Tokyo Bay and Ise Bay (about a 790km round-trip route) from February 26 to March 1, as part of the fully autonomous ship program "MEGURI 2040" led by The Nippon Foundation. Furuno Electric Co., Ltd. (hereinafter referred to as "we"; headquartered in Nishinomiya City, Hyogo Prefecture; Yukio Furuno, President") participates in the consortium and mainly works on developing autonomous navigation system (on board) and remote emergency response system (on land).
In the test, a voyage including offshore navigation, bay navigation, coastal navigation, and berthing maneuvering (about 790km from Tokyo Port to Tsumatsusaka Port to Tokyo Port), has been successfully completed by an autonomous navigation system*² using a container ship "SUZAKU". This container ship equipped with an autonomous navigation system, remote operation and abnormality prediction functions with the support from the Fleet Operation Center which controls the ship by the signals from satellite and ground.
Designing the Future of Full Autonomous Ship Consortium
The DFFAS Consortium consists of about 60 companies including 30 companies in Japan and other cooperating companies and organizations overseas, has been developing a comprehensive fully autonomous navigation system through open innovations. In the test, the SUZAKU (95 meters, 749 gross tons) navigated a 790-kilometer round-trip route departing from and returning to Tokyo Bay by way of Ise Bay using a comprehensive fully autonomous navigation system, including remote operation from the Fleet Operation Center in Chiba Prefecture.

This successful demonstration in a highly congested area (roughly 500 ships pass through Tokyo Bay each day*3) verifies a high level of technological development that represents a significant step toward practical implementation. In addition to addressing the issues of aging crew and crew shortages facing the coastal shipping industry and the social issue of accident reduction, remote operation from land can be expected to introduce new work styles and increase labor capacity for crews.
Demonstration test, development highlights
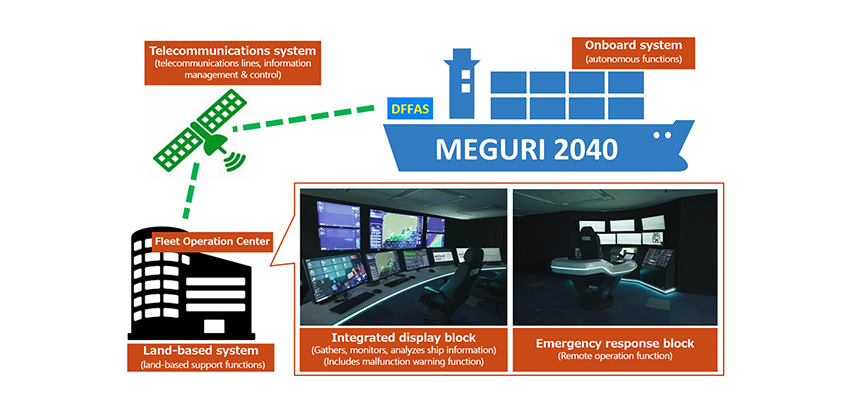
With an eye toward full-scale implementation, the DFFAS Consortium developed a comprehensive fully autonomous navigation system with repeated risk assessments carried out from the design stage. The system has three primary components: (1) a ship-side navigation system that controls autonomous functions from the ship; (2) a land-side system that monitors and supports the ship from shore, including remote ship-handling functions; and (3) an information and communications system that enables stable communication between the ship and land.
Especially for (2), the Fleet Operation Center marks a particular advance, allowing fully autonomous navigation at sea with tracking from land of functions normally performed by crew, including the monitoring of weather and sea conditions, traffic flow, and the ship’s equipment. In emergency situations, the system can switch to remote operation from the Fleet Operation Center, ensuring the overall system’s safety and stability.
Our role
As a steering committee member of the DFFAS Consortium, we led the technical group (TG) 1 (autonomous navigation system development) and TG3 (emergency response system development) and contributed to the success of this demonstration test.
We led the TG1 that development of the autonomous navigation system (APExS: Action Planning and Execution System) that carries out voyages (from berthing to berthing) as planned while preventing collisions based on information obtained from onboard sensors. We are also responsible for the development of the Action Planning Unit (APU), which plays a central role in APExS. APU integrates the target information obtained from the millimeter-wave radar (newly developed for demonstration tests), X/S-band radar, AIS, and camera image recognition system (made by ORCA AI) to grasp the surrounding conditions of the ship. Moreover, it consists of functions to formulate necessary collision avoidance maneuvering plan by the target information in cooperation with collision avoidance planning system (made by Japan Marine Science Co., Ltd.) and send control commands to autopilot, DPS and speedpilot to control the ship’s movement.
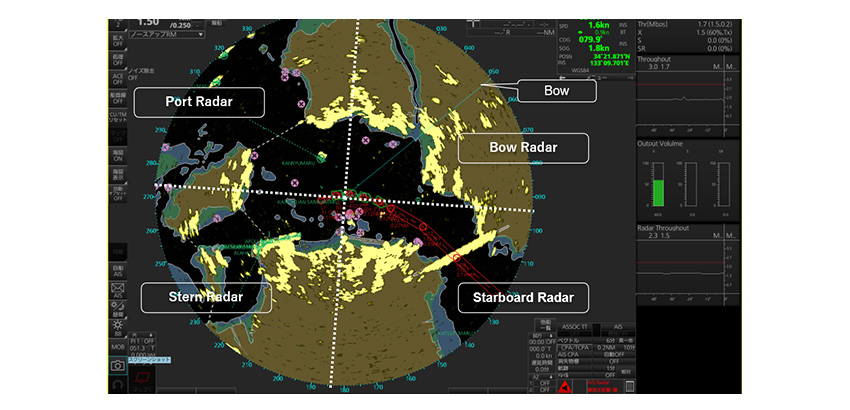
a screen shot of millimeter wave radar (combined 4 radar display images)
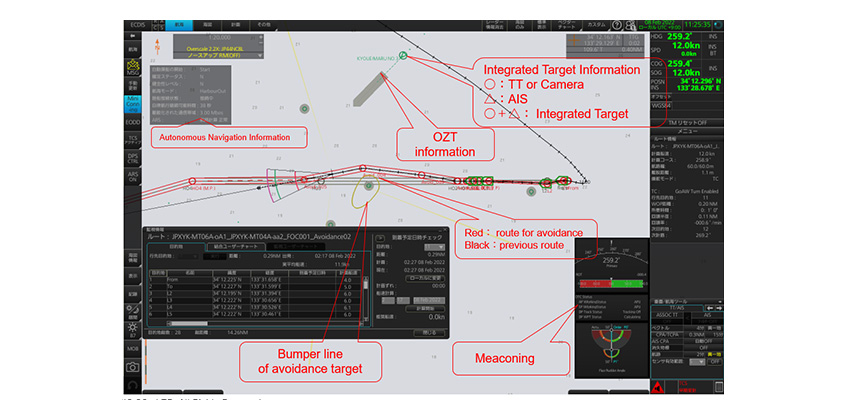
APU screen shot
At TG3, constituting the Fleet Operation Center (FOC), we have developed a remote emergency response system. It secures the safety of the ship by remote support and control on land when the autonomous navigation system determines it is necessary.

remote emergency response system
Based on the technologies cultivated from the project so far, we are aiming for the early realization of autonomous navigation for safe voyage and we will continue to work on technological development for zero marine accident.
- * ¹ The DFFAS Consortium is led by Japan Marine Science Inc., and includes Bemac Corporation, Eizo Corporation, Furuno Electric Co., Ltd., Honda Heavy Industries Co., Ltd., Ikous Corporation, Japan Hamworthy, Co. Ltd., Japan Marine United Corporation, Japan Radio Co., Ltd., Kinkai Yusen Kaisha Ltd., Mitsubishi Research Institute, Inc., Mitsui Sumitomo Insurance Company, Ltd., Miura Co., Ltd., MTI Ltd., Nabtesco Corporation, Nihon Shipyard Co., Ltd., Nippon Yusen Kabushiki Kaisha, NTT Communications Corporation, NTT Corporation, NTT Docomo, Inc., NX Shipping Co., Ltd., Pluszero Co., Ltd., Sanwa Dock Co., Ltd., Sky Perfect JSAT Corporation, Sunflame Corp., Suzuyo Marine Co., Ltd., Tokio Marine & Nichido Fire Insurance Co., Ltd., Tokyo Keiki Inc., Weathernews Inc., and YDK Technologies Co., Ltd.
- * ² The autonomous ship framework "APEx S-auto" is used in the autonomous navigation system developed by the DFFAS Consortium. APExS-auto is applying for AiP certification approval from ClassNK and Bureau Veritas
- * ³ According to Ministry of Land, Infrastructure, Transport and Tourism, Tokyo Bay Waterway Office data (in Japanese only) (https://www.pa.ktr.mlit.go.jp/wankou/data/index.htm)
Related Links
Announced on March 1, 2022 (The Nippon Foundation): 5th Demonstration Test of Fully Autonomous Ship Navigation Successfully Completed
https://www.nippon-foundation.or.jp/en/news/articles/2022/20220301-67775.html
Announced on February 9, 2022 (Furuno): Successful sea trial of autonomous sailing on a large car ferry voyage
https://www.furuno.co.jp/en/news/general/general_category.html?itemid=1119&dispmid=961
Announced on February 4, 2022 (Furuno Electric): Successful sea trial of autonomous ship voyage
https://www.furuno.co.jp/en/news/general/general_category.html?itemid=1116&dispmid=961
Announced on September 22, 2021 (Furuno): Fleet Operation Center Completed for Crewless Maritime Autonomous Surface Ship Project
https://www.furuno.co.jp/en/news/general/general_category.html?itemid=1066&dispmid=961
Announced on June 17, 2020 (Furuno): FURUNO Participates in autonomous ship demonstration trials
https://www.furuno.co.jp/en/news/general/general_category.html?itemid=905&dispmid=961
Information contained in news and other announcements (product price, product specifications, service, release date, contact information, URL, etc.) is current on the date of posting, but subject to change without notice.